
产品展示
数控Ⅰ-工作原理
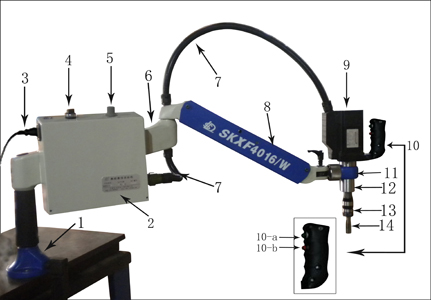
工作原理:
“力仕达”数控悬浮攻丝机SKXFGSPI/W,由一个气压弹簧平衡的摆动平行四边行,加一个可旋转3600横臂组成,将万向电动马达头固定住,并保持其垂直于工作区。整个装置由三个M8螺钉或直接用夹具将底座固定在工作台上,其电动马达装置有速换系统,齿轮减速伺服电机直接驱动,输出扭矩转速为恒扭无级调速,配合马达速换系统中的扭力夹头安装的丝锥进行工作……
机器本身垂直度的保证、旋臂的运转精密灵活,及具有安全离合、扭力设定的扭力夹头保证了不断锥,不乱牙,螺纹几何尺寸准确,通规、指规检测合格,垂直度能保证在0.05mm。且效率大大提高.
SKXFGSPI型配置的安全扭矩丝锥筒夹,内部带可调扭矩离合机构,若超过设定的扭矩,离合打滑保护丝锥,即使攻盲孔,丝锥也不易折断。